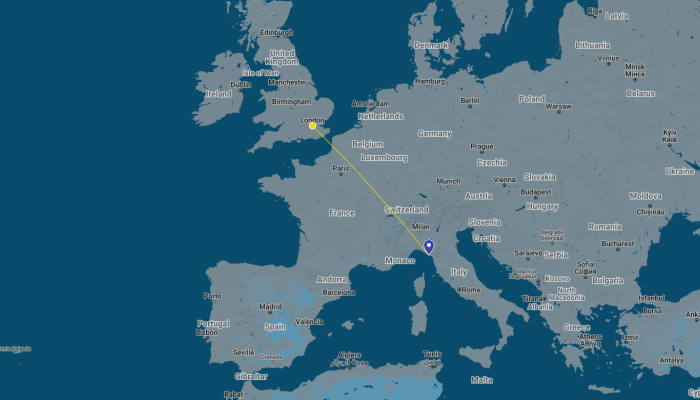
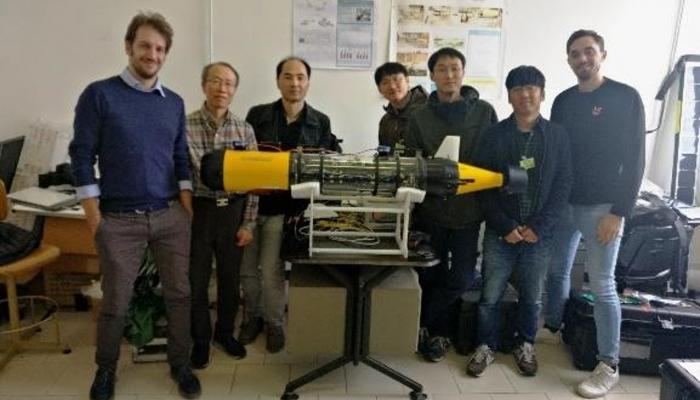
The aims of ECOGLIDER are to capitalize on recent developments and methodologies in sensing and robotic technologies to demonstrate potential services for marine activities needing advanced observations in the Arctic Ocean. Two sensing technologies from the end-user were added to the underwater glider at NOC: real-time passive acoustic monitoring and scientific echosounding. After the technical integration was finalized and tested in the lab, the glider was sent to the NOC research cruise, which took place between 18 June 2021 and 29 July 2021, along the shelf and deep ocean west of Ireland.