Access/Technology provider: Norwegian University of Science and Technology – NTNU, NTNU-SF30K and NTNU-SMALL_AUV installations
End User: University of Southampton, UK
Dates: April 2021 – November 2021
Goal: This project focuses on an adaptive habitat mapping in a fjord using heterogenous robotic platforms.
These TNAs envisioned use of NTNU LAUV and ROV to collect structured surveys at scales matched to their capabilities, while a group of novel bottom imaging floats would complement the observations with drifting transects. The data gathered will be useful to characterize the distribution of cold-water corals in the area and will help establish reference sites for future monitoring.
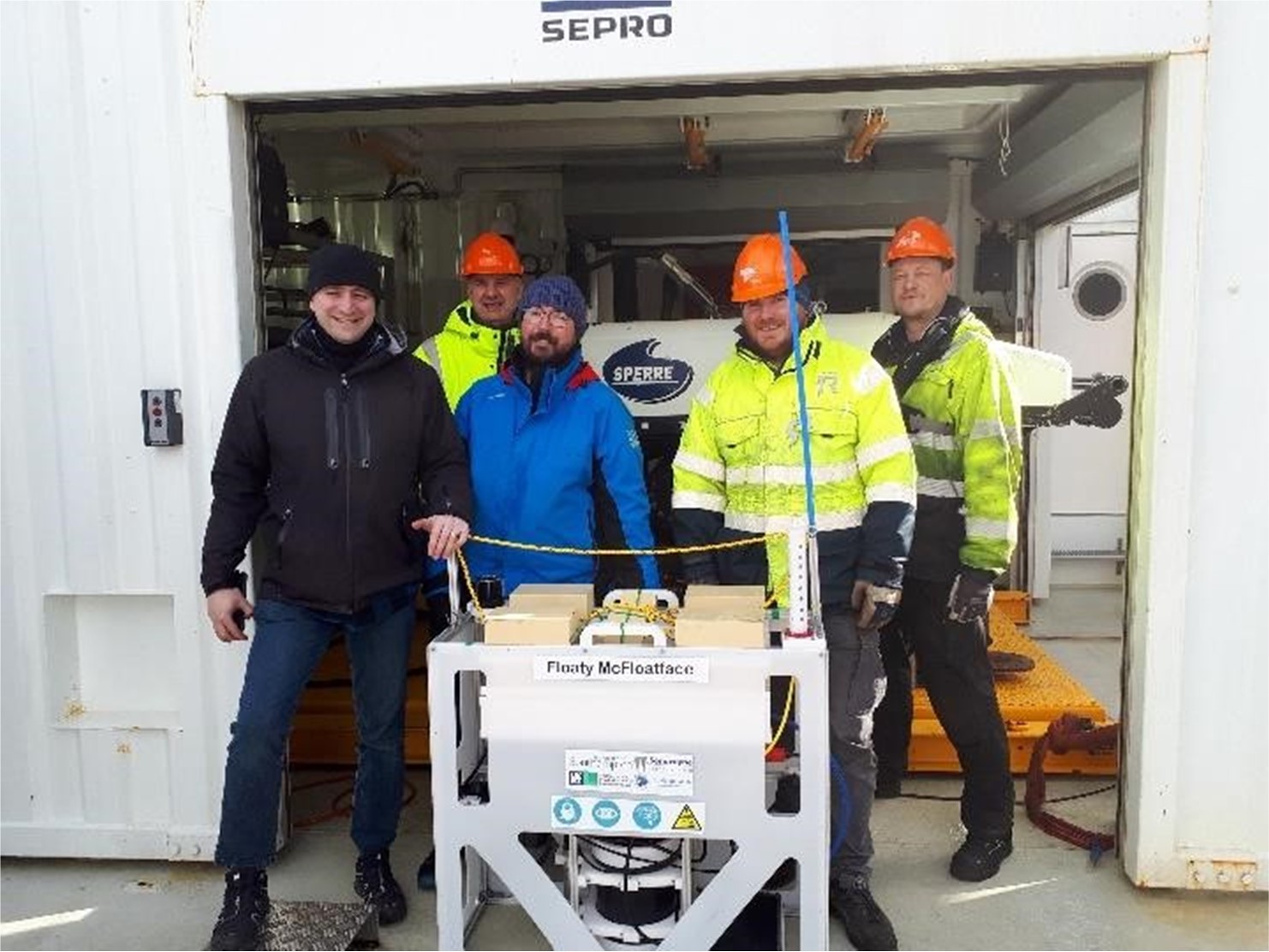
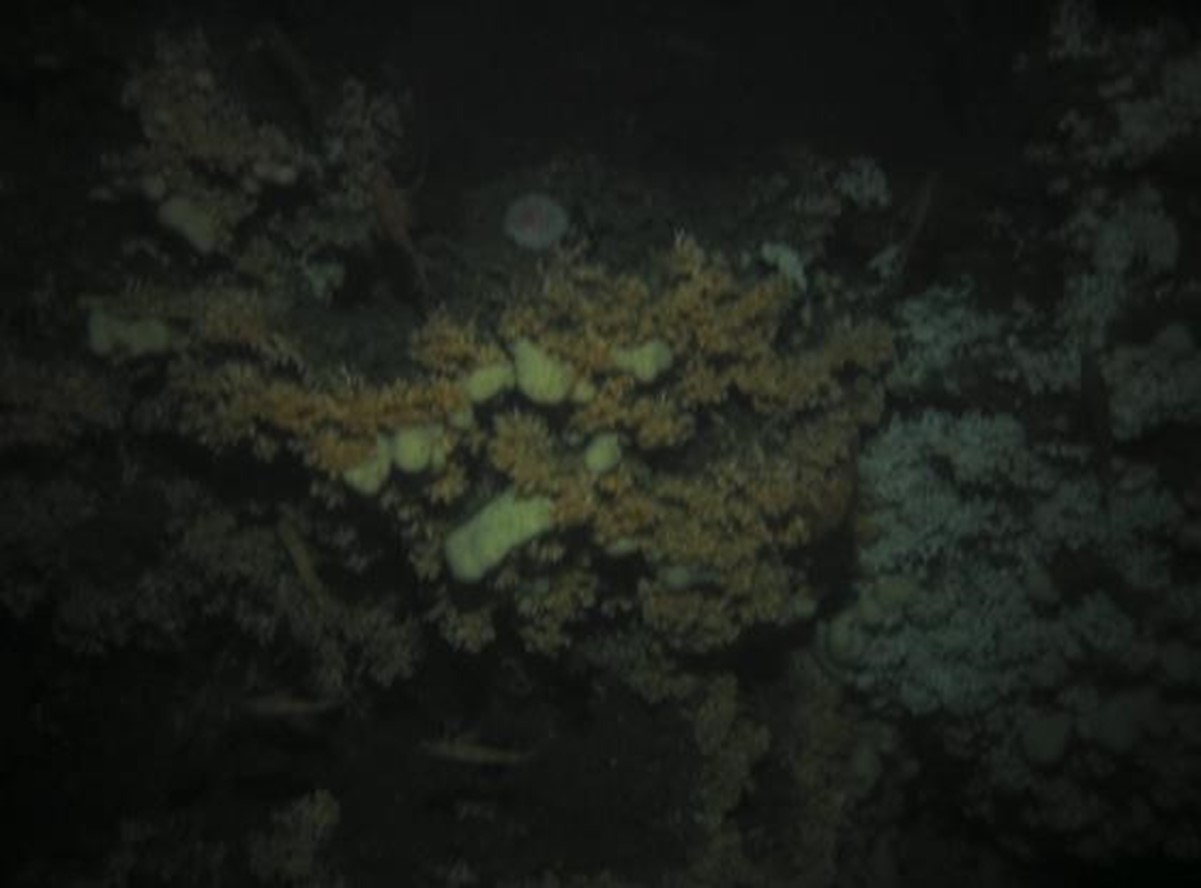
This project marked the first field trials of the University of Southampton Ocean Perception Laboratory’s Driftcam. Although Driftcam did not complete a full mission successfully during this TNA, the experiences lead to refinements of the Driftcam hardware and software. These improvements have led to successful deployment as parts of other projects. Several transects were performed with SF30K ROV at Tautra site known for abundance of corals and strong currents. During the access ROV collected stereo camera imagery used in postprocessing to map cold-water corals habitats. Missions were performed at low altitudes in order to provide better quality of stereo images while periodically very strong current in the area made the operation very challenging. Tautra ridge is an area with a very steep terrain, pinnacles and strong currents that proved to be very challenging for the AUV mission that follows the seabed at low altitudes. Performing the missions during the low current period, large-scale visual imagery and sidescan data from the fixed altitude of 3-5 meters depending on visibility and terrain for deep coral habitat mapping were collected.