Access/Technology provider: Heriot-Watt University, T_ROBO
End User: Louisiana State University, USA
Dates: 15.11.2021 to 19.11.2021
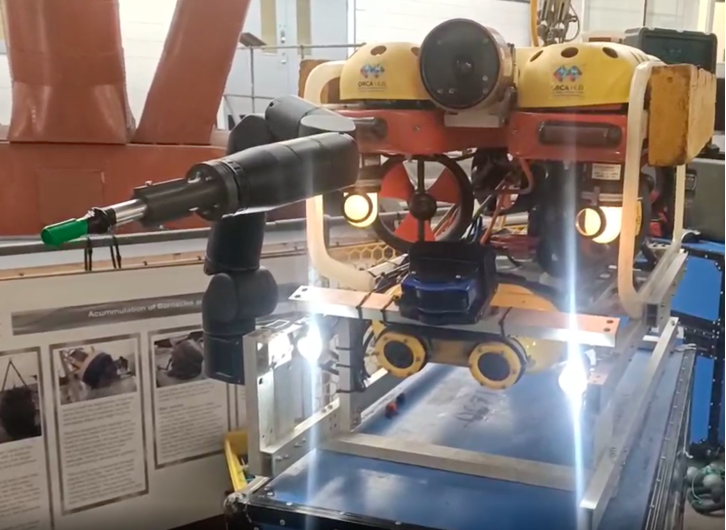
Goals: Underwater manipulator control against external disturbances
A Saab SeaEye Falcon vehicle was integrated with a BlueprintLab Reach Bravo 7 Degree-of-Freedom manipulator and a wrist 6-axis force/torque sensor module was installed to sense forces for testing the developed underwater manipulator control algorithm against current.