
Access/Technology provider: ISME, ISME-SEALAB_AUV (Florence and Pisa nodes)
End User: CERN, EP-DT-DI Section (Experimental Physics - Detector Technology - Detector Interface), Switzerland [Public RI]
Dates: 25-03-2019 to 18-10-2019
Goals: The goal of this TNA focused on the “Investigation and experimental activities aimed at developing an AUV for Liquid-Argon Time Projection Chambers” is twofold. First part of the TNA is more characterized as activity of education nature that is preparatory for a full fruition of the second, applicative, part that includes experiences on ISME AUVs at SEALab infrastructure.
The Liquid-Argon Time Projection Chamber (LArTPC) is a pioneering particle detector, whose basic layout foresees a series of detecting panels housed inside a cryostat filled with ultra-pure liquid argon. An autonomous robotic device is strongly required to perform visual inspections, diagnostic measurements and simple manipulative tasks inside such detectors. The robot would allow to operate inside the cryostats without emptying them, thus avoiding the high cost of periodically putting them out of service. The main task of the robot is to provide a good vision of every location inside the cryostat, by approaching (even slowly) and hovering close to the target location. On the other hand, cryogenic temperatures and the strict constraints imposed by detector engineers require the use of innovative solutions in several fields: energy management for unwired motion in cryogenic environments, a propulsion system that minimizes perturbation to the medium and avoids any contamination, localization and motion control relying on wireless data transmission between the inner part of the cryostat and the outside, etc.
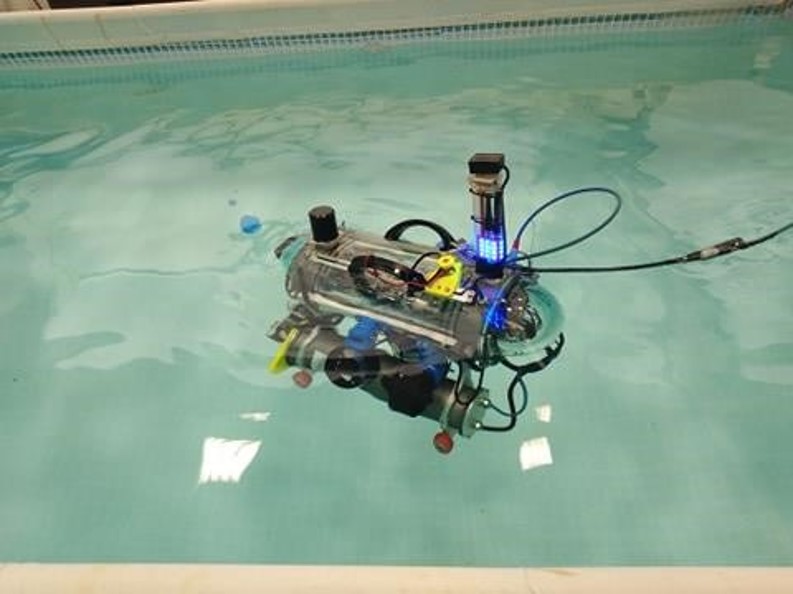
The project aimed at using the ISME infrastructure for conceiving and/or evaluating methods, tools and technologies concerning control and localization of autonomous underwater vehicles. The work plan involved an initial educational activity, whose goal was to provide a wide understanding of the most effective localization systems (such as those based on acoustics), as well as control strategies for AUVs (in different operating conditions and configurations). The following experimental activity, carried out at SEALab (La Spezia, Italy), was aimed at increasing familiarity with common practice operations: vehicle setup, launch and recovery, mission planning through software, data monitoring and verification, vehicle localization, vehicle and battery handling.
The long-term objective is to exploit the acquired in-depth knowledge and training for the future development of an AUV able to accomplish long-lasting missions inside large cryostats, such as those employed for LArTPCs.
The project provided the end-user with a wide treatment of state-of-the-art design approaches, modeling and simulation software frameworks, as well as advanced research trends in the field. Typical scenarios and case studies were presented alongside. A particular emphasis was dedicated to the acquisition of conceptual tools and practical knowledge on design and implementation of complex localization systems for AUVs.





Seminars and other educational activities will contribute to disseminate the project achievements among scientists and students across CERN, the applicant institution. It is expected that the project results, as contributions to the development of an AUV for operation in large cryostats, will be the subject of a scientific publication in the near future.