
Partners

Universidade do Porto
UPORTO participates in this project through the Laboratório de Sistemas e Tecnologias Subaquáticas (Underwater Systems and Technology Laboratory - LSTS) based at the Faculty of Engineering. The LSTS is one of world leading laboratories in the field of networked air, underwater, and surface vehicles. The LSTS has successfully fielded unmanned air, ground, surface and underwater vehicles in innovative operations in Europe and in the United States of America that include some world firsts.The LSTS has been involved in fostering and growing a world-wide research network in the area of networked vehicle systems with yearly conferences and workshops. The LSTS has been organizing, in cooperation with the Portuguese Navy, the Rapid Environmental Picture (REP) annual exercise since 2010. In addition, researchers from LSTS also participated in experiments, organized and hosted by collaborators, and taking place in the Pacific and Atlantic oceans, as well as in the Mediterranean and Adriatic seas.
The LSTS spun-off the Oceanscan Marine Systems and Technologies company that commercializes the LSTS award-winning Light Autonomous Underwater Vehicles (LAUV).

The LAUV is a lightweight, one-man-portable vehicle that can be easily launched, operated and recovered with a minimal operational setup. The operation of the LAUV does not require extensive operator’s training. The LAUV is an affordable, highly operational and effective surveying tool. Starting at a basic functional system that includes communications, computational system and basic navigation sensors, the LAUV capabilities are built up adding optional payload modules.

The X8 delta wing UAV is an easy-to-launch, quick-recovery solution for fast algorithm testing, terrain mapping and operational surveillance. This system boils down to a simple one-man single laptop setup configuration with a large array of capabilities. It is an affordable platform ideal for surveillance and Wi-Fi coverage expansion.
The glider shape and size allows for a logistically light operation setup with a short time for preparation.

The FlightWave Edge™ UAS is a hybrid tricopter fixed-wing aircraft system that: Takes off and lands from anywhere, seamlessly transitioning from VTOL to horizontal flight; Requires no nets, catapults, or other cumbersome ground equipment to operate; Enables quick, tool-free assembly, and modular payload.

Manta Communications Gateway works as a plug-and-play communication hub, supporting seamlessly wireless and acoustic communication between the operator and the LAUV, enabling extended connection range. It allows multiple operators to control and monitor multiple vehicles in a networked environment.
Battery powered for full autonomy and portability and comes in a rugged waterproof enclosure that allows installation in a buoy and/or operation in open vessels such as RHIBs. Serves as a communication, navigation and tracking tool, helping the operator to remotely track, monitor, command and interact with the LAUV while in full operation mode.
The Manta Gateway may integrate several capabilities and accessories:
- Wi-Fi – This is the primary mean that enables long range, high-throughput communication with the vehicle when it is not submerged
- Acoustic Modem – for long-range underwater communications.
- HSDPA/GSM modem – provides direct connection to the internet when GSM network coverage is available.
- Iridium SBD Modem – supports satellite communications with worldwide coverage.
- GPS Receiver – provides the device’s real-time position. This feature allows the operator to understand its own location in the mission map. It’s particularly useful when the operations are conducted from a ship.
University of Bremen
MARUM of the University of Bremen aims to investigate the ocean margins, the transitional zones between the oceans and the continents. The region of the ocean margins extends from the coastal zone across the shelf and the continental slope to the continental rise. More than 60% of all Earth’s people live in the adjacent coastal land areas, and they have intensively exploited coastal waters for the extraction of raw materials and food over a long period. In recent times, human activity has spread farther out into the oceans as the margins gain increasing attention as potential centres for hydrocarbon exploration, industrial fisheries and other exploitations by man. Thus, especially in recent years the increasing need to investigate the ocean margins has become clear - a task to which UNI BREMEN will contribute significantly. The research themes span from environmental changes in the Tertiary to the impact of recent coastal constructions, and from microbial degradation in the sediment to large scale sediment mass wasting along continental margins.
MARUM is the first research faculty at the University of Bremen also offering a number of technical and scientific services and developing innovative technology in support for scientific operations. MARUM also hosts the largest out of three IODP core repositories with >150 km of core from DSDP times to present from the Atlantic and Arctic Ocean, Mediterranean, Black and Baltic Seas, and is partner in the ECORD Science Operator. All mission-specific Onshore Science Parties are hosted at MARUM, and more than annually 200 visitors from all over the world go to the IODP Bremen Core Repository (BCR).

The MARUM-QUEST 4000m remotely operated vehicle (ROV) is a full sized, so called "work class" deep-water ROV, originally designed to serve industrial needs for offshore production and intervention tasks. At MARUM, QUEST is continuously adapted to the needs of deep-sea research, utilizing its high electrical power and large payload capacity to provide a versatile platform for state-of-the-art deep-water science at water depths down to 4000 meter. Today, it has proven its value during over 30 expeditions since 2003 with more than 370 scientific dives

MARUM-SQUID is a powerful, light Work-Class ROV for operations down to 2000 meter water depth. The system was designed to be deployed even from smaller vessels. The ROV is operated by three to four Pilots/Technicians and the entire system can be shipped in a single 20' ISO container.
The vehicle is equipped with three scientific cameras (1 x HD, 1 x SD, 1 x 14 MPixel stills), has a sonar and two Line-Laser for size measurements of objects on the seafloor. A full proportionally operated seven function manipulator can be used for sampling or operating scientific tools. Samples and scientific gear can be stored/installed in a drawer box. Scientific sensors can be connected to several serial ports and 1 GigBit Ethernet link. The ROVs sensor systems allow station keeping the vehicle, and to fly accurate tracks above the seafloor. Due to the high thruster power, the ROV can operate in areas with up to three knots current speed.

Current glider designs are suffering from limited scientific payload capacity which is a good motivation in its own right. Furthermore employing more energy efficient, low drag designs would vastly extend the application range. With the MOTH design study we were picking up a concept that is now extensively used in unmanned flight vehicles (drones), the blended wing design. Earlier attempts in that direction have proven to be quite successful. In particular higher horizontal speeds could be reached and with the blended wing shape offering new payload capabilities other sensor types (sonar systems).

Commercially 5000m rated, dry Li-ion battery powered deep-sea AUV, equipped with fibre-based inertial navigation system. Predominantly used for multibeam mapping tasks. Currently, a Kongsberg EM 2040 MBES is installed on the AUV.

Associação do Instituto Superior Técnico para a Investigação e Desenvolvimento
The ”Organization of Instituto Superior Técnico for Research and Development”, is a private not-for-profit organization devoted to research and development activity in Information and Communication Technologies, including Aerial and Marine Robotics. IST ID has a large participation of the Instituto Superior Técnico (IST, https://tecnico.ulisboa.pt/en/), the leading school of engineering in Portugal, part of the Univ. Lisbon, Portugal. IST hosts the Institute for Systems and Robotics (ISR/IST, http://welcome.isr.tecnico.ulisboa.pt/) a Center of Excellence that promotes advanced multidisciplinary R&D in the areas of networked autonomous systems (land, marine, and space vehicles), automation and control, signal and image processing, intelligent robots and systems, and communications, with a strong emphasis on experimental field work. The core of the work planned in the scope of this initiative will be done at ISR/IST, where the research and development activities in the general area of networked aerial and marine robotic systems are coordinated by IST staff members. ISR/IST has a staff of 33 senior researchers that are also IST faculty, 11 Postdoc researchers, 63 PhD students, 30 MSc students, and 15 research engineers and technicians involved in more than 30 R&D national and international projects.

The vehicles, Medusa Autonomous Marine Vehicles, are autonomous submerged/semi-submerged robotic vehicles developed at the Laboratory of Robotics and Systems in Engineering and Science (LARSyS)/ISR of the Instituto Superior Técnico of Lisbon, Portugal.
Each Medusa class vehicle weighs approximately 30[Kg] in air and consists of two acrylic housing tubes of size 150[mm] by 1035[mm] (diameter x length) with Aluminum end caps, attached to a central Aluminum frame. The distance between the two bodies is 150[mm].
Roll and pitch do not need to be actuated because of the buoyancy, which guarantee that the vehicle has large enough metacentric height. Since the first version of this vehicle was intended to be a surface craft, in the state which is MedusaS, the heave motion is not being controlled as well. By the aid of two vertical thrusters, the MedusaD vehicle is intended to be a diving vehicle as the heave motion is being controlled independently of horizontal motion
Research vessel to carry out experimental and support work with marine robots and auxiliary systems in the Tagus river and at sea.

Test tank for lab experiments with marine vehicles and equipment.
Access to protected area (350x500m, water depth from 3 to 6m, directly from the quay, for small scale experiments and engineering tests)

Integrated Systems for the Marine Environment
UNIGE-ISME is an Inter-university Research Center that supports research activities in the fields of marine technologies and oceanic engineering. UNIGE groups together Italian researchers working at various Italian Universities: Politecnica delle Marche (Ancona), Bologna, Calabria, Cassino e del Lazio Meridionale, Firenze, Genova, Rome La Sapienza, Salento (Lecce), Pisa and Trieste. The ISME nodes will be involved in the proposal under the H2020 definition of ``Third parties related to the beneficiary carrying out part of the work''. UNIGE-ISME benefits of the research infrastructure of the participating departments (laboratories, workshops, etc.), and has the purpose of exploiting synergies and collaborative efforts among the participants within an agile and flexible organizational structure. The researchers participating to UNIGE-ISME share the interest in marine technology research.

Typhoon vehicle is a middle-sized class AUV, whose features are comparable with other existing vehicles, such as Remus series from Kongsberg. Considering the vehicle sizes (length of 3600 mm, external diameter of 350 mm, weight of 130-180 kg according to the carried payload) and the expected performances (maximum reachable depth of about 300 m, at least 10-12 hours of autonomy and a maximum speed of 5-6 knots) the vehicle can be considered an intermediate one compared to the smaller Remus 100 and the bigger Remus 600. Typhoon presents some innovative features which greatly contribute to reduce production and maintenance costs:
- The extended use of low cost corrosion resistant materials: thanks to the use of composite material such as fibreglass, the production cost of the hull is quite low. Also the maintenance is quite simple;
- Modular mechanical design with commercial components: the use of low cost commercial Lithium-Polymer batteries usually used for ground racing vehicles contributes to reduce the costs. The actuators and the propellers of the propulsion system are completely modular and interchangeable. Both propulsion, and manoeuvring thrusters are actuated with the same motor and drive system: a standard actuation unit with a 200 W brushless motor and drive directly fed by the 48 V provided by the batteries and controlled through an industrial CAN bus. The same actuation system can also be used to control movable navigation surfaces like rudders and fins, resulting in a highly customizable actuation system. The calibration of the pitch static attitude can also be performed moving the accumulators whose axial position is controlled by a screw system;
- Extended use of fast prototyping techniques: the vehicle is easy customizable since many components and accessories are built using ABS plastic material, shaped using 3D printers. This way, many components may be easily customized and rebuilt in few hours. Moreover, the prototyping techniques have greatly accelerated the production of the components.

AUV, 120m depth rated, equipped with M900-130 BlueView; Multibeam - 900 kHz Frequency and 130 deg Field of View

The Fòlaga design has focused on the observation that a vehicle performing mesoscale ocean measures in shallow coastal waters has to exhibit a mixture of gliders and AUVs capabilities. In particular, it is allowed to navigate on the surface for most of the time, and it has to dive, possibly vertically, at the selected measurement locations.
The Fòlaga carries a CTD (conductivity, temperature,depth) sensor as payload, and, when on surface, it maintains contact with a surface station through a GSM telephone link. The link is used to transmit the current vehicle position and the oceanographic data (once re-surfaced). It can be used from the surface station to reprogram on-line the vehicle mission or for remote control by acting directly on the vehicle propulsors. In this last case, the Fòlaga is turned into an untethered remotely controlled vehicle
The vehicle is composed by two cylindrical fiberglass sections, connected at the center, for a total length of about 3m, and 0,12m diameter. The two-sections design allows for easy transportation, while the resulting elongated and thin shape, together with two vertical fins located at stern and bow, guarantees good track-keeping performance. Inside the cylinders, the electronic package and the battery power packages are hosted. The Fòlaga is powered by lead acid batteries guaranteeing 8 hours of autonomy. The propulsion is obtained through jet flow pumps. The second vehicle version has six pumps, two for horizontal propulsion (at the stern), two for vertical propulsion (at bow and stern respectively) and two lateral propulsors for steering purpose, located at the vehicle bow, that allow the vehicle to turn even at zero surge velocity.

ASV, approx 3x2 m
7DOF underwater arm

With over 3,600 lumens of efficient and powerful LED (Light Emitting Diode) lighting, the VideoRay Pro 4 submersible is capable of illuminating even the darkest of environments.
The forward light reflectors have been engineered to distribute the light evenly throughout the camera tilt range, making lights that "track" the camera unnecessary. The two LED arrays are positioned outside the main pressure hull to provide the greatest separation from the camera. This distance is key to minimizing back-scatter, or the reflection of waves, particles, or signals that can cloud the underwater camera.
The combination of camera and lighting on the VideoRay Pro 4 will produce impressive video quality in a variety of water conditions. With the VideoRay Pro 4 you never worry about your lighting "burning out" or even changing a bulb

SeaLab is a research laboratory located inside a miltary area of Italian Navy. Access to SeaLab of civilian personnel therefore requires previous authorization from Italian Navy, and compliance with internal existing regulations within the Navy base

Faculty of Electrical Engineering and Computing, University of Zagreb
The UNIZG-FER is the highest-quality member of the University of Zagreb, with a large and modern infrastructure devoted to research-based education. Currently UNIZG-FER participates in more than 20 projects financed by EU through various grant schemes (FP7, IPA, COST, …). LABUST is a research group within the Department of Control and Computer Engineering at the UNIZG-FER. At present, the Department consisting of 14 professors and 40 researchers. LABUST research results, equipment level and capacity for globally relevant research has immensely profited from the FP7 CURE project.
LABUST research group holds expertise in marine robotics: development and adaptation of marine vehicles; acoustic networks and sonars; identification, navigation, guidance and control of marine vessels; cooperative and coordinated formations of marine vehicles. LABUST is currently coordinating one FP7 project (CADDY), one H2020 project (EXCELLABUST) and is a partner in number of FP7 (EUROFLEETS2), H2020 (subCULTron, PlaDyFleet) and ECHO-DG (e-URready40S) project. In the last 5 years the group has also participated in other 6 international and 3 national projects related to marine robotics. The LABUST group has experience in developing guidance and control software for industry (VideoRay, USA; LD TravOcean, France). LABUST is a light member of HYCON2 network of excellence. They have organized 9 annual field trainings “Breaking the Surface” with the purpose of conducting multidisciplinary research within marine biology, archaeology and security.

AUV; 70 kg WT; developed at UNIZG-FER for diver interaction applications, underwater tablet onboard the vehicle allows interaction with divers; equipped with ARIS multibeam sonar, DVL, USBL, 6 thrusters

USV, each 20kg WT, developed at UNIZGFER used for various applications from diver tracking to marine monitoring, suitable for multivehicle control; X-configuration of thrusters; payload options to be mounted to the bottom: bathymetry sonar, multibeam sonar, stereo camera, USBL, acoustic cmodems

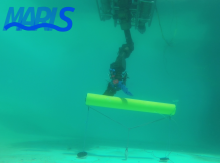
University of Girona
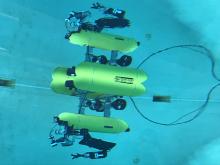
VICOROB research team of the University of Girona has a strong experience in the design and development of hovering AUV prototypes with high-resolution image mapping capabilities. 5 AUV prototypes have been designed during the last 10 years, all of them having a different conceptual design. During the last years the team has worked on the development of advanced image processing techniques for the 2D and 3D mapping of the seafloor, as well as with the fusion of these techniques with navigation data coming from state of the art navigation sensors (DVL, gyros, USBL) together with global optimization techniques to face large-scale maps. Map based navigation and Simultaneous Localization and Mapping of underwater robots using both acoustics and/or video images is currently one of the main topics of research. VICOROB has also a long experience in intelligent control architectures and has contributed in mission control systems, behaviour-based architectures, robot learning and path planning for AUVs. Finally, the group has expertise in mechatronics and software integration. UdG has consistently shown in the past that it can afford young and senior researchers the proper intellectual setting for training in the interdisciplinary field of cooperative autonomous robotics.
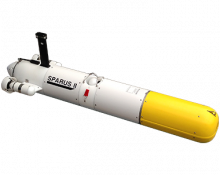
Lightweight autonomous underwater vehicle for a maximum depth of 200m used for survey and mapping applications. It's capable of hovering and has an easily configurable payload area and an open software architecture. Imaging Sonar (ARIS) subjected to disponibility. Can connect custom payloads following power/connection specs.

AUV 500m DP, 150kg WT; developed at UdG and used for survey, inspection and mapping applications. Hovering capabilities and several payload options: multibeam and profiler sonar, stereo camera and acoustic modem. Imaging Sonar (ARIS) subjected to disponibility. Can connect custom payloads following power/connection specs.
Test tank of 16x8x5m with direct view from control room.

7m rigid boat with an hydraulic crane for shoreline operations.

University of Limerick
The University of Limerick (ULIM) with over 13,000 students and 1,300 staff is an energetic and enterprising institution with a proud record of innovation and excellence in education, research and scholarship. ULIM participates in this project through the Centre for Robotics & Intelligent Systems (CRIS) based at the Department of Electronic & Computer Engineering. Established in 2000, the CRIS is the only research centre focused on the application and development of marine robotics within the island of Ireland. From marine robotics to navigation, sensor development, emergency response planning, remote operated vehicle (ROV) and unmanned aerial (UAS) technologies, they are actively involved in developing a diverse range of practical technologies in national funded, European funded and industry collaborative projects.

Inspection class ROV, 150m tether, 130kg WT, Oceanrings control system, ROVINS Nano Inertial navigation system, high thrust-to-weight ratio ROV. 2 X single mode fibre optic cables through umbillical to ROV.

2000m rated Light-workclass Intervention ROV, 1.8T WT. Oceanrings control system, PHINS Inertial navigation system, high thrust-to-weight ratio ROV. 4 X single mode fibre optic cables through umbillical to ROV. Launch and recovery system with 1m foldable platform & 2200m of armoured umbillical. Tether managment system with 400m of umbillical. 3 x 4k UHD cameras, Laser, high resolution sonar imaging systems, dual 7P Schilling Manipulators, 12-station Smart Valve pack, Multiple SD cameras / ethernet ports / serial ports, submersible RTK GPS, 20ft control cabin, Free-swimming ROV capabilitiy with free swimming winch & 600m of neutral umbillical.

Oceanic Platform of the Canary Islands
The Oceanic Platform of the Canary Islands is a multipurpose service centre with land-based and novel sea-based infrastructures to support research, technology development and innovation in the marine and maritime sectors. Its mission is to promote long-term observation and sustainability of the ocean, providing a cost-effective combination of services, such as an ocean observatory, a marine test site, a base for underwater vehicles, training and an innovation hub. PLOCAN is a joint initiative of the Spanish and the Canary Islands governments, with the contribution of the European Regional Development Fund, whose main objective is to build and operate a fixed offshore platform that will be located both close to the coast and near the edge of the continental shelf, at 30 m depth. It will have a net surface of around 2,500 m2 of research capacity, with space for laboratories, workshops, lecture rooms, instrumented containers and capacity to permanently accommodate researchers distributed in a multi-storey building with a main dock of 1,000 m2.
In addition PLOCAN is configured as a Test Site where projects focused on testing and demonstrating of all kinds of marine devices are performed. These include mainly marine renewable energy converters but also underwater and surface autonomous vehicles, fixed buoys and marine observatories, profilers, sensors, etc. The Test Site spans over a marine area of 23 km2 and covers distances from shore from 2 to 5 km and depths from 20 to 600 m. PLOCAN provides also a Test Site in confined waters in the harbour of Taliarte (East coast of Gran Canaria).

1000 m. depth Sensor Payload: CTD, Dissolved Oxygen, Chlorophyll and Turbidity. Endurance: 1-4 months (if alkaline or lithium batteries) Iridium Rudics telemetry Cruise speed: 0.25 m/s

SV2 Model. Payload: CTD, dissolved oxygen, meteo station and PAM (passive acoustic module). Endurance: unlimited Iridium SBD telemetry Cruise speed: 1-1.5 kn

The PLOCAN Test Site spans over a marine area of 23 km2 and covers distances from shore from 2 to 5 km and depths from 20 to 600 m. PLOCAN provides also a Test Site in confined waters in the harbour of Taliarte (both located in the East coast of Gran Canaria)
NATO STO Centre For Maritime Research and Experimentation
The Centre for Maritime Research and Experimentation (NATO STO CMRE) is a world-renowned NATO scientific research and experimentation facility located in La Spezia, Italy. CMRE was established by the North Atlantic Council on 1 July 2012 as part of the NATO Science & Technology Organisation. The CMRE and its predecessors have served NATO for over 50 years as the SACLANT Anti-Submarine Warfare Centre, SACLANT Undersea Research Centre, NATO Undersea Research Centre (NURC) and now as part of NATO’s Science & Technology Organisation.
NATO STO CMRE conducts cutting-edge maritime scientific research and experimentation, ranging from concept development to prototype demonstration at sea. Over the preceding decades, NATO STO CMRE has produced global leaders in acoustics, oceanography and other disciplines in addition to pioneering key technologies and approaches that are now employed worldwi
The Centre’s output has also been applied to build a number of operational concepts and capabilities for NATO and the nations. NATO STO CMRE has an experienced Engineering Department (ED), providing the capability to rapidly develop concepts into prototypes that can be demonstrated at sea, in trials and military experiments. The ED has a range of leading-edge maritime test facilities, coupled with talented engineers with decades of experience working in offshore environments. A particular strength lies in measuring and assessing, to stringent standards, underwater noise.

Permanent testbed deployed in the gulf of La Spezia, Italy and remotely accessible through the internet to conduct underwater communications experiments. The LOON is composed by 4 bottom-mounted tripods separated by ~500 m one from another. The tripods are fitted with different acoustic capabilities based on the Woods Hole Micro-Modem, EvoLogics S2S 18/34 and arbitrary waveform transmission and recording capability. An additional high-resolution, wideband acoustic recording capability (at frequencies above 1 kHz) from a tetrahedral array of hydrophones, a thermistor chain (measuring continuously the temperature in the water column + the sound speed in two points in the column) and an Acoustic Doppler Current are also available as part of the test bed to provide a correlation with the environmental conditions. A container lab. aggregates all support hardware and is the point of confluence for the underwater cables deployed in the Gulf. A weather station with automated data acquisition of rain, wind speed and wind direction is installed on the roof of the container lab and is also a part of the test bed to complement the environmental data capabilities.
The access to this wide range of acoustic and non-acoustic sensors allows the unique capability of long-term (from hours to cross-seasonal variations) measurement of acoustic performance and its relation with oceanographic and meteorological parameters.
The LOON has been explored in multiple ways since its first deployment in 2011. From the experience CMRE and partner institutions have had with the test bed, we can identify the following uses for the LOON:
1. As a communications testbed: This was the original purpose of the test bed and the one with which a wide range of trials can be performed, from testing and validation of acoustic waveforms to networking protocol.
2. As a software testing / hardware-in-the-loop tool: The LOON can provide a “world-in-the-loop” capability for communications software debugging and testing. From a functional perspective (and not a underwater communications R&D one), the nodes can be used to stress-test software over long periods of time and to validate query-reply schemes employed in underwater communications and underwater localisation.
3. As an AUV control / navigation testing facility: The ranging capabilities of the installed modems (as well as the arbitrary waveform capabilities) can been explored to develop schemes that support AUV formation keeping using ranging information as the only positional awareness.
Heriot-Watt University
HWU is a modern technological University with campuses in Scotland, Dubai and Malaysia, In the 2014 UK Research Evaluation Framework it’s Engineering was rated 1st in the UK for research power. The Ocean Systems Laboratory will lead, part of the Edinburgh Centre for Robotics a £35M joint venture between Heriot-Watt and Edinburgh Universities, including a Centre for Doctoral Training supporting 100 PhD students, and the £8M ROBOTARIUM national UK equipment facility. The Ocean Systems Laboratory is 30 strong, supported by EU, EPSRC, MoD, US ONR and Defence R&D Canada funding. It has a 30 year pedigree in AUVs and marine robotics, creating internationally successful businesses in Coda-Octopus Ltd, SeeByte Ltd/Inc, and Hydrason Ltd. It contributes to Marine Science & Technology Scotland (comprising 700 researchers turning over £66 million annually).

Nessie is a single hulled torpedo shaped hover-capable inspection AUV that can be used in multiple operation roles. Designed primarily to participate in the annual SAUC-E AUV competition and also for scientific experimentation and general sub-sea research, it is an extremely useful tool.It provides a platform for new autonoumous software and hardware systems and is used for missions requiring a hover-capable vehicle as well as standard survey missions. It complements the Labs Remus 100 AUV very well and forms the backbone of our multiple vehicle research collaboration.

The C-Enduro is a catamaran driven by a pair of electric outboard legs and powered by a large array of solar panels, a wind turbine generator and a diesel generator in the starboard hull. Very much a power boat in design, it too was developed in Britain. It is launched and recovered from a road trailer and is towable. It has the largest payload capacity both physically and electrically, but probably the shortest sea endurance period of 60-90 days. Sensors can be mounted on the main vessel, on the drop keel or tow an array. It also has a 100m electric winch, although not with a conducting or fibre optic cable.

The Iver system offers the widest range of world class sensors and sonar packages with simple operation in near coastal environments. VectorMap software makes mission planning, data processing and reporting a seamless process. The Iver3 AUV takes many of the traditional challenges out of inshore surveys where tethered approaches can be challenging.

This robot is a high-speed (up to 5 knots) transit AUV designed for operation in coastal environments up to 100 meters in depth. It serves as a platform for high-level algorithm evaluation and experimental validation of new autonomous software systems. Fitted with an extra processor, we can extend its normal use by designing and adding our own payloads. It successfully participated in a number of experiments which also included DTC (Defence Technology Centre) multi-AUV coordination trials with Nessie III and Autonomous Pipeline Tracking (AUTOTRACKER project)

Dimensions: 4m x 3m x 2m fitted with a cartesian plotter system.The cartesian plotter system allows the Lab to simulate and validate various systems being developed. It has three axes of motion,X,Y and Z.

SONOBOT is a small, simple and usable platform for planning and executing a hydrographic survey that can deliver accurate geo-referenced bathymetric measurements and high-quality imagery with minimum transport, launch and recovery efforts.
Norwegian University of Science and Technology
The Norwegian University of Science and Technology is Norway's primary institution for educating the future's engineers and scientists. The Departments of Marine Technology a conducts research and education in of a high international caliber, with topics that reflect NTNU's own priority areas, such as marine technology, underwater technology, control engineering and autonomous systems and operations. The departments do also house a Centre of Excellence on autonomous marine operations and systems (AMOS - https://www.ntnu.edu/amos) with leading national and international collaborators.
To address applications of underwater science and technology, NTNU formed the Applied Underwater Laboratory (AUR-Lab) in 2011. The lab is an inter-faculty collaboration to promote application of underwater robotics in basic and engineering research both through scientific collaboration and by maintaining a pool of equipment. Two ROVs and three AUVs are maintained and operated. The main activity is to support research cruises, either for engineering science or for basic science. This includes technical modifications and adaptations. So far several hundred operations have been completed ranging from minor student tests outside the Biological Station to operations on the Arctic mid ocean ridge.

The Jetyak is a kayak with a gasoline engine that can be radio controlled or operated autonomously. AUR lab is in charge of enabling it for different marine research activities. The resource is shared with the Arctic University of Norway in Tromsø.
The vehicle can be deployed with a land or ship crane with a minimum weight capacity of 500kg. Alternatively, there is a trailer for beach deployements. An ideal beach for deployment should have a smooth transition into the water, preferably without much wave activity, not very soft bottom but also not very rocky. It is important to consider that, at a minimum, 1 person needs to get in the water and might need special clothing.
Different modules can be fitted into the two moonpools of the vehicle. Depending on the applications, we build the modules to fit the sensors to equip the Jetyak with.
A pilot with a radio controller can manually operate the Jetyak from the distance, as long as it sees it. Navigation in the dark is aided by standard nautic lantern color code. It is also possible to operate it from a computer based station and with a Joystick. GPS-aided positioning and a radio link between the vehicle and the computer aid navigation in this case. Finally, a waypoint-based route can be programmed on the vehicle for it to operate autonomously. Note that it is not capable to identify and avoid obstacles.

The LAUV is a platform able to carry different sonar and sensors combinations. The LAUV modular and flexible design makes possible to configure a system during production according to the end user needs.
The LAUV can combine several sensors to gather data from the water column. The LAUV most common request are CTD, sound velocity, turbidity, chlorophyll, rhodamine and fluorescein. We work with the major sensors manufacturers and we are able to offer an extended range of sensors such: pH, dissolved oxygen, redox, crude and refined oil.
More complex and advanced sensors are also possible, such:
- MicroRider microstructure turbulence measurements
- Digital Holographic Particle Imaging System
- Magnetometer sensor

The Remus 100 has its own software for mission planning. Its modularity enables it to include new instruments on board. The vehicle is heavy for a person to carry it. A metallic frame is thus necessary to set it in the water.

NTNU's research vessel, R/V Gunnerus, was put into operation in spring 2006. The ship is fitted with a dynamic positioning system and a HiPap 500 unit, optimal for ROV operations and the positioning of any deployed equipment.
Gunnerus is equipped with the latest technology for a variety of research activities within biology, chemistry, technology, geology, archaeology, oceanography and fisheries research. The ship is fitted with a dynamic positioning system and a HiPap 500 unit. This provides optimal conditions for ROV operations and the positioning of any deployed equipment. In addition to research, the ship is used for educational purposes and is an important platform for marine courses at all levels and disciplines.

he instrument system comprises three parts. The control room, a winch and the ROV itself. The control room is a standard 20ft long container that weighs approximately 5 tons and has room for both pilots and a small scientific team. The winch and the ROV are transported in a 20ft long, 6tons open container. These items are positioned differently depending on the main vessel from where the ROV is deployed. We have experience using both, NTNU's research vessel Gunnerus and University of Tromsø's RV Helmer Hanssen. Deployment of the ROV requires a 2ton crane to take the ROV in and out of the water.
Underwater positioning also depends on the vessel we are operating from. On RV Gunnerus the Kongsberg HiPaP 500 system is used regularly with one or two corresponding transponders mounted on the vehicle. Other positioning systems that have been used include Applied Acoustics Easytrak and Kongsberg's HPR300 and LBL.
Marine Institute
The Marine Institute is the State agency responsible for marine research, technology, development and innovation in Ireland. The MI carries out environmental, fisheries and aquaculture surveys and monitoring programmes to meet Ireland’s national and international legal requirements. The MI provides scientific and technical advice to the Irish Government to help inform policy and to support the sustainable development of Ireland’s marine resource.
The aim of the institute is to safeguard Ireland’s unique marine heritage through research and environmental monitoring.

Description of the infrastructure: Length: 65.5 m / Breadth : 15 m / Draught : 5.8 m / Gross tonnage: 2425 T / Net Tonnage: 727 T. Operating cruising speed : Maximum speed 16 knots Service speed 10 knots / Max access: 21
The Celtic Explorer is a multipurpose research vessel with Dynamic Positioning which carries out a wide variety of survey operations in offshore as well as deep sea locations, including ROV Surveys, fisheries surveys, acoustic and oceanographic surveys, buoy and mooring handling operations, environmental sampling, and geological and hydrographic surveying. The vessel complies with the noise requirements of ICES CRR Report 209 for underwater radiated noise. The vessel has an adaptable drop keel which houses an array of instruments.
It has the capacity on deck to carry 7 x 20 ft containerized laboratories on board. The on-board equipment, deck machinery and layout fulfill all the needs for state-of-the-art scientific marine research and training. The laboratory facilities on board are outstanding; large wet, chemistry and water labs, which are, fitted with a stainless steel fish sorting system, freezer room and refrigerators. The vessel is fitted out with high availability LAN and a Dry Lab of 75 m2. It is ideally configured to undertake acoustic surveys of pelagic fish. The vessel is adapted to accommodate a variety of Remotely Operated Vehicles including the Deepwater ROV Holland I, Kiel 6000 ROV and MEBO drill system. Specific Scientific equipment: Equipment available for: Physical/Chemical Oceanography Surveys, Marine Biology, Geology and Fisheries Research and Acoustic surveying.
Permanent Scientific EquipmentGeneral:
- Motion reference system Kongsberg Simrad Seapath 200;
- Underway data logging Kongsberg Simrad MDM400;
- USBL Systems IXSEA GAPS/ Sonardyne Ranger 2;
- Weather system BATOS II;

Distretto Ligure delle Tecnologie Marine
The Ligurian Cluster for Marine/Maritime Technologies (DLTM) promotes research, innovation and education boosting a continuous interaction and synergy between research organisations and enterprises. The cluster is actually involving more than 140 enterprises – of which about 130 SMEs – the University of Genoa, three major national public research bodies having institutes in Liguria (CNR, ENEA, INGV) dealing with maritime and marine research and technological development, ì big enterprises (Fincantieri, LEONARDO, Intermarine, Termomeccanica) engaged in production and development of marine/maritime technologies in both software and hardware and the Italian Navy trough the Naval Support and Sperimentation Centre (CSSN). The cluster is also including medium and big enterprises working in information technologies.
DLTM, represents the Liguria regional excellences on specific technologies while operating at national and international level in the following areas of competence: naval technologies both for the defence and the civil sectors, shipbuilding and leisure boat crafting technologies and monitoring, remediation and security of the marine ecosystems. DLTM has the role to promote collaboration between maritime industry and marine science, represented in the cluster, and its supporting research, innovation and education and new synergism between public and private organisations. This action creates opportunities for competitiveness and new business development. The attention of DLTM on dual technologies allows boosting the integration between Italian Navy and commercial technologies.
HPC architecture can solve a variety of complex problems through parallel computing together with Modelling and Simulation advanced technology, Big Data analysis, Machine and Deep Learning.
Hardware Configuration: 18 compute nodes (Dual CPU Intel E52695 V3) each with 28 core and 64 gB of RAM, for a total of 504 core and more than 1TB of RAM; Infiniband FDR 56 gB/s; 2 NVIDIA K40M for GPU Computing; 1 Head Node with 24 core and 384 gB of RAM; High Performance Storage with 21 tB; Computing Power: 18 Teraflops (GPU excluded).
Software Configuration: Bright Cluster Manager; CentOS 7; PBS Pro; all main libraries and compilers (OpenMpi, Intel Parallel Studio XE 2017, Gcc, Fortran, ecc..)
Software Applications: OpenFOAM, Ansys CFD, MSC Suite (Nastran, Patran, ecc..) Star-CCM+.
Cloud computing offering i.e. users can access to computing resources such as servers, storage and networking trough advanced Software-as-a- Service (SaaS) and Infrastructure-as-a-Service (IaaS) with Windows and Linux VM.
Hardware Configuration: 4 nodes with Dual CPU Intel E52650 v3 with 128GB of RAM; 80 core and 512 gB of RAM; 4 nodes with Four CPU Intel E54620 v3 with 256 gB of RAM; 160 core and 1 tB of RAM; 240 core and 1.512 tB of RAM; storage based on “MS storage Spaces” in “Scale Out File Server” with 55 tB and 2.9 tB of SSD (for cache)
Software Configuration: System center 2012 R2; Azure Pack: Self-service portal and cloud services such as virtual machine hosting (IaaS), database as a services (DBaaS), and more.

PROTEUS (Portable RObotic TEchnology for Unmanned Surveys) is a reconfigurable vehicle that has the possibility to act as ROV, AUV or USSV. Light and manageable, is highly modular thanks to the open-frame chassis that allows for quick installation and shifting of tools, equipment and sensors. Even thrusters are interchangeable and displaceable modules. In this way the vehicle can be reconfigured at every mission according to the specific needs. The vehicle will be available for operations at the CNR Dirigibile Italia station in Ny Alesund, Svalbard islands, Norway.

SWAMP – shallow water autonomous multipurpose platform. Access allows testing of algorithms for autonomous (cooperative) Navigation Guidance and Control, and distributed control. SWAMP can be configured as catamaran-like single ASV or two single hull ASVs.

Natural Environment Research Council
The National Oceanography Centre (NOC) is the UK’s Centre of Excellence in oceanographic sciences, and the Southampton site is home to Europe’s largest and most capable marine robotics facility, called Marine Autonomous and Robotic Systems (MARS). This facility is supported by the Natural Environment Research Council (NERC) and forms part of the UK’s National Marine Facilities, which are made available to the UK science community and other UK stakeholders.
The MARS facility is benefitting from >£25M of UK Government capital investment in the current decade as part of the UK’s ‘Eight Great Technologies’ initiative, and comprises over 40 robotic platforms supported by a staff of 35 development and operational engineers. MARS has been operating marine robots for over two decades, and has pioneered their use in some of the most challenging environments on Earth, including under ice and in the deep ocean.

Standard sensors usually fitted to gliders in the NOC fleet include conductivity, temperature, depth (CTD), a fluorescence sensor measuring chlorophyll, optical backscatter and colour of water and an oxygen optode. They can usually carry one other sensor, such as a fish-finding echo-sounder or a light level sensor (PAR sensor).
On certain expeditions, gliders have also been fitted with larger, more power-hungry sensors. Because they are not designed for this, the battery consumption is increased and mission length is decreased, often to only a few weeks. The slow and gentle way a glider flies enables it to measure a profile from 1000m, to within a couple of metres of the surface, without disturbing the structure of what it is measuring, as most other vehicles or methods would.
The great strength of a glider is the ability to build up a picture of the structure of the ocean in both space and time, what is called 4-D sampling, giving us fine detail over a wide area. They are good at mapping the position of oceanic fronts, plotting the change in the thermocline where the surface water meets the deep oceanic water and many other slowly changing features that are important in the calculations behind oceanic global warming models

The C-Enduro is a catamaran driven by a pair of electric outboard legs and powered by a large array of solar panels, a wind turbine generator and a diesel generator in the starboard hull. Very much a power boat in design, it too was developed in Britain. It is launched and recovered from a road trailer and is towable. It has the largest payload capacity both physically and electrically, but probably the shortest sea endurance period of 60-90 days. Sensors can be mounted on the main vessel, on the drop keel or tow an array. It also has a 100m electric winch, although not with a conducting or fibre optic cable.
The C-Enduro is a 4.2m by 2.4m catamaran with a large arch or mast giving an air draught of 2.8m. The total weight is around 500kg. Currently NOC’s C-Enduro it is fitted with an Airmar WX150 on the mast, an RBR CTD and a fluorescence puck on the drop keel and several ports for GoPro cameras. Navigationally it has an AIS transponder and a SeaMe radar transponder. Communications are received and transmitted via WiFi or Iridium. For power, the 12 photovoltaic arrays provide up to 1.2kW, the Aerogen wind turbine up to 0.7kW, and the diesel generator provides 3.2kW when it is running. The propulsion uses up two 1.4kW motors, but is usually run at around 50% to give a nominal speed through the water of 2.5–3.5 knots, with a top speed of 7 knots.
Of the three ASVs, C-Enduro will suffer from biofouling to a greater extent than even a 200m underwater glider and consequently, will lose speed over a three-month deployment even if antifouling paint or another coating is applied.

The AutoNaut, developed in Britain, is another wave-powered vehicle with the two pairs of wings or foils set on struts at either end of the vehicle. The hull is narrower than the Waveglider with its shape resembling a canoe. It is also significantly smaller than the Waveglider, making deployment, recovery and towing a lot simpler. In order to recharge the battery while at sea, AutoNaut too has solar panels fitted to the surface and can be fitted with a 25W methanol fuel cell for longer deployments where sunshine is at a premium.
The AutoNaut is 3.5m long with a beam of 0.43m and weighs around 100kg. The ASV is currently fitted with an Airmar WX150 weather station with a hull penetrator for a fluorescence puck and two towing points to which one RBR CTD can be fitted. AutoNaut also has an AIS transponder, SeaMe radar transponder and back-up GPS tracker. The two photovoltaic arrays in series provide 125W and a lithium Iron sulphur battery provides the main power. Communication is via Iridium or short-range radio. Operating more like a glider than the other two ASVs, the AutoNaut has an operating speed of 1–2 knots, but can reach a maximum of 3 knots. AutoNaut also has a small thruster, which can be used to aid in propulsion. The small size and small battery mean that for most missions, consumption has to be kept within what the PV array can provide. This in turn gives it very long duration, potentially six months.

The Waveglider consists of two parts: a float or surface unit and a glider or submarine unit, connected on the NOC vehicle, by a 7m umbilical. Developed in Hawaii, the float unit is based on a surfboard. The sub is fitted with pivoting wings and, as the float rises and falls with the waves on the surface, the sub unit is moved up and down at depth, where the pivoting wings provide drive and the vehicle moves forward. The float contains the control unit, battery and sensors and is covered with solar panels.
Deployment is straightforward, the float and sub are strapped to a floating frame, towed into position or lowered from the deck of a ship. The release line is pulled and the sub drops away, powering the vehicle instantly. The float has GPS and Iridium modules, and is steered by a rudder on the sub. There is also a thruster for limited manoeuvring when there is insufficient swell to power the vehicle. Recovery requires two lifts onto the deck of a ship or, more delicately, a harbour wall when the vehicle has been towed into port.
The Waveglider weighs approximately 250kg with the weight split fairly evenly between the surface and the sub-unit. The surface unit is 2.9m long with a beam of 0.66m. It has three main payload bays and several masts for instruments and communication. The sub-unit is 2.2m long with a wingspan of 1.4m for the fins. Sensors can also be fitted to the sub-unit, as can towed instruments. Currently one battery is fitted, with a second to be fitted in the future, charged by three photovoltaic arrays capable of up to 156W. As long as the consumption over 24 hours does not exceed the solar power supply, the sea endurance of the Waveglider is technically indefinite.
Currently the NOC Waveglider is fitted with a Seabird CTD on the sub, a Sonardyne acoustic modem, an RDI 300kHz workhorse ADCP and an Airmar WX150 weather station. Speed in a good swell can be 3–4 knots but 2kts is more usual. It has a SeaMe X-band radar transponder and an AIS receiver. Piloting and communication is via Iridium, mobile phone and WiFi. It also has a secondary independent GPS tracker.

The Autosub Long Range AUV (or Autosub LR) is a new type of AUV with a depth rating of 6000m. Although a third the weight of the Autosub3 and the Autosub6000 AUVs, it is able to travel greater than ten times the distance and can be deployed for over a hundred times the duration.
The key to achieving this performance is efficient propulsion at slow speed (at 0.4 ms−1), and by keeping tight control of the power used by the AUV sensors and control systems. One area in which recent advances in technology has helped make this possible has been in the development of microprocessors for devices such as mobile phones which have ample processing power, but which use very little energy.
With a 6000km range, an endurance of six months and a depth rating of 6000m, this AUV is very useful to oceanographers in providing measurements of ocean and seabed properties over ocean scales, and without the need for a research ship. The AUV periodically surfaces and transmits the data back to the scientists via an Iridium satellite data link.
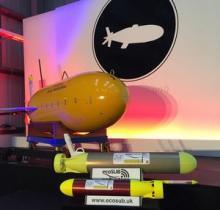
The new ecoSUBμ and larger ecoSUBm are economically and environmentally more cost efficient than their larger counterparts. Furthermore, a ‘shoal’ of microsubs can work together to collectively create a far superior 3D map of the underwater environment than a lone AUV. They can survey a large area very quickly, covering hundreds of kilometres. Paired with complementary technologies, such as autonomous surface vehicles and satellites, a more complete picture of the oceanic environment can be constructed than ever before.

The 93 meters, 3,180 t NATO ship NRV ALLIANCE was designed in the mid 80’s as a quiet acoustic research platform. It is capable of operating in all oceans strategically important to NATO nations. ALLIANCE enables scientists and engineers from the Centre and partner nations to conduct a wide range of experiments. The ship is equipped with modern scientific instruments, a sophisticated navigation system, and its deck comprises of a vast array of winches (some fitted and some removable), heavy cranes, a lateral frame and a stern U-frame (including a large 4 drum main tow winch for large arrays). This variety of deck equipment allows a large variety of launch and recovery of scientific and engineering sensors, oceanographic instruments, autonomous vehicles and tethered devices. ALLIANCE can accommodate a variety of containerized payloads as well.
A key feature of ALLIANCE is its main laboratory where scientist have at their disposal about 150 square meters of space to work. Additionally, the ship was designed with quiet operation in mind and as such, can be operated under various engineering configuration (eight noise states in total including propulsion using batteries) to reduce and eliminate radiated noise throughout the ship.
The ship includes 400 square meters of open deck working areas, 500 square meters of scientific storage spaces, and 225 square meters of additional scientific spaces (such as internal oceanographic winch, wet lab, tactical coordinator and conference rooms).

Institut Français de Recherche pour l'exploitation de la Mer
The French public institute for marine research contributes, through studies and expert assessments, to knowledge about the ocean and its resources, monitoring of marine and coastal zones and the sustainable development of maritime activities. To these ends, it designs and operates observational, experimental and monitoring tools and facilities. Ifremer manages the ocean research fleet for the French scientific community, with three all-ocean research vessels and 4 coastal ships. Ifremer develops basic and applied research, expertise activities and industrial and technological development actions, for all areas related to the economic utilisation of the oceans and especially for deep-sea research.
The Unit for Underwater Systems provides technical systems and related services for the scientific exploration of the deep ocean. The unit englobes 40 technicians, engineers and researchers in a wide scope of skills in underwater technology i.e. mechanical and electrical engineering, underwater acoustics and vision, signal- and image processing and robotics and computer science.

Hybrid ROV/AUV (max depth 2500m), equiped with high resolution multi-beam echo-sounder and still photo camera, vacuum sapmling devices, and two 5F & 7F electric manipulator arms.Ariane is based on communication through a unique fiber optic cable and can be deployed from smaller coastal vessels (>25m)

AUV (max depth 3000m) with various payloads (multi-beam echosounder, sub-bottom profiler, environmental sensors such as ADCP, CTD, Fluorimeter, magnetometer), possibility of raman spectrometer, The vehicle is 4,5m long, xeighs 800kg in air, and is operated from coastal ships providing A-fraem or crane for the vehicle deployment.