
Access/Technology provider: Heriot-Watt University, T_ROBO
Dates: 02-07-2021 to 09-07-2021
GOAL: The main objective of this TNA was to test and deploy a path integration system for navigation of AUV based on a newly discovered type of neuron in deep neural networks using the facility provided. The project shows how the system to localise underwater vehicles accurately even encountering waves.
The TNA utilized the customized BlueROV2 as a testing platform. It performed a series of test to estimate the position of the underwater vehicle. The navigation system based on grid cells, reads velocity information coming from the DVL and estimation of the current position in the xy plane. It also performed tests in the wave tank to analyse the effect caused by oceans waves in the generated estimation of the position using the proposed approach. The experiments were done remotely using the remote access platform developed at the Ocean Systems Lab in Heriot-Watt University for remote TNAs.


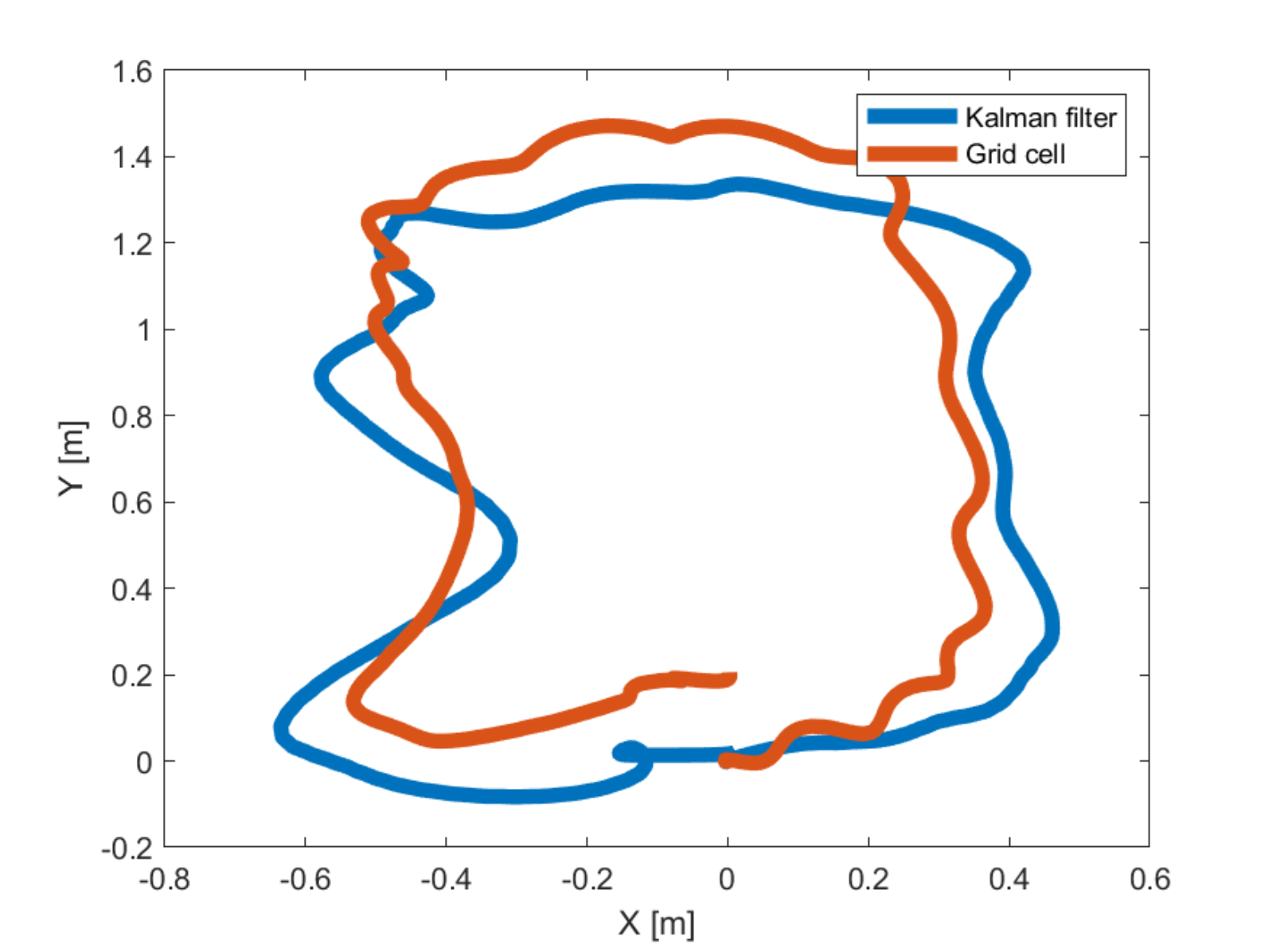
The obtained results have been submitted to the conference Oceans 2021 San Diego – Porto. A preprint of the article is available online at Carlucho, I., Bailey, M.F., Paula, M.D., & Barbalata, C. (2021). Marine Vehicles Localization Using Grid Cells for Path Integration. Url: https://arxiv.org/abs/