Technology provider: University of Girona (UdG)
End User: Tampere University (Finland)
Dates: 14/10/2019 - 18/10/2019
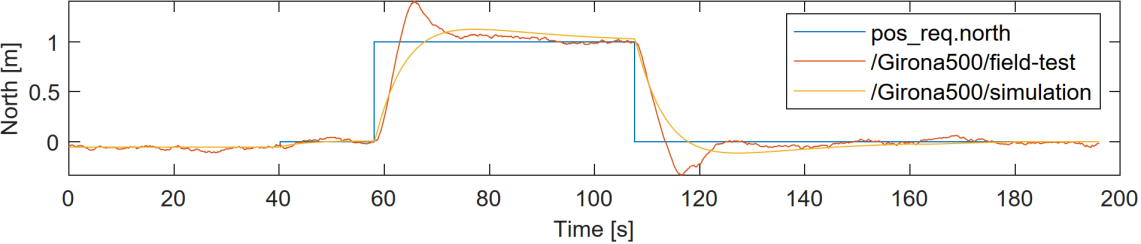
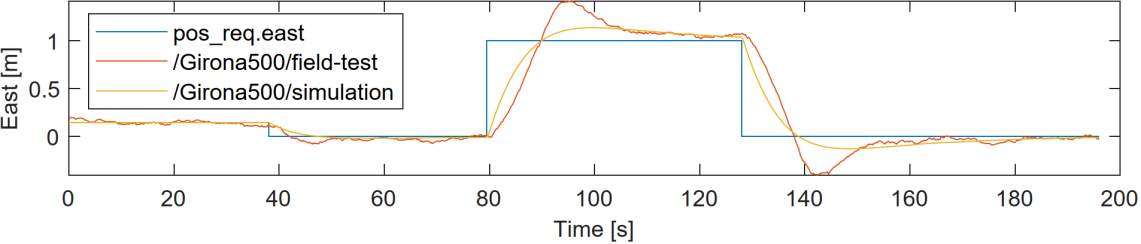
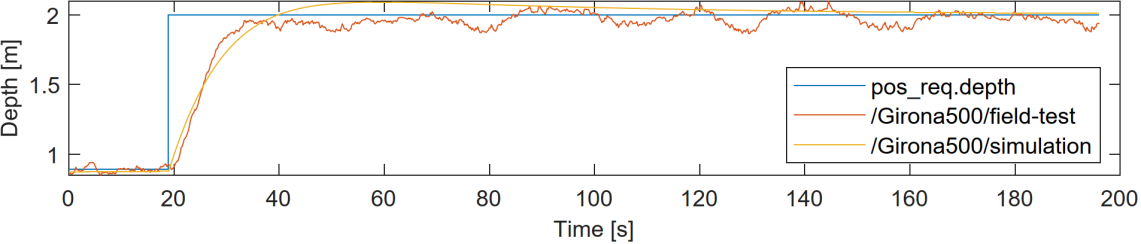
GOAL: Test and implement a model-based control architecture for AUVs
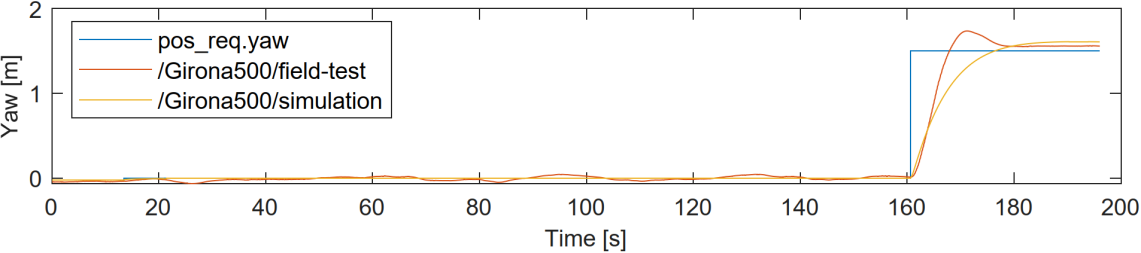
The aimed algorithms were based on the low-level control of the Girona 500 AUV providing accurate position control as well as obstacle avoidance capabilities using a Micron Scanning Sonar. The algorithms were developed in Matlab Simulink and automatically compiled to ROS to ease the workflow and testing.