
Access/Technology provider: UdG, UdG-WT_S2 and UdG-WT_G500
End User: Laboratoire COSMER, France [Academia]
Dates: 14-06-2021 to 18-06-2021
Goals: This project consists of several parts. The first one is to repeat the experiments of the previous TNA with Toulon University with a high accuracy camera system to have a more precise location of the AUV than when using dead-reckoning navigation. The second part consists in two different methods of cable management for cabled vehicles, and the third is focused on locating an acoustic reflector.
Description:
- Series 1 Experiment: Hydrodynamic Parameter Estimation for 2 Independent Motions (HPE 4 IM) - surge and heave
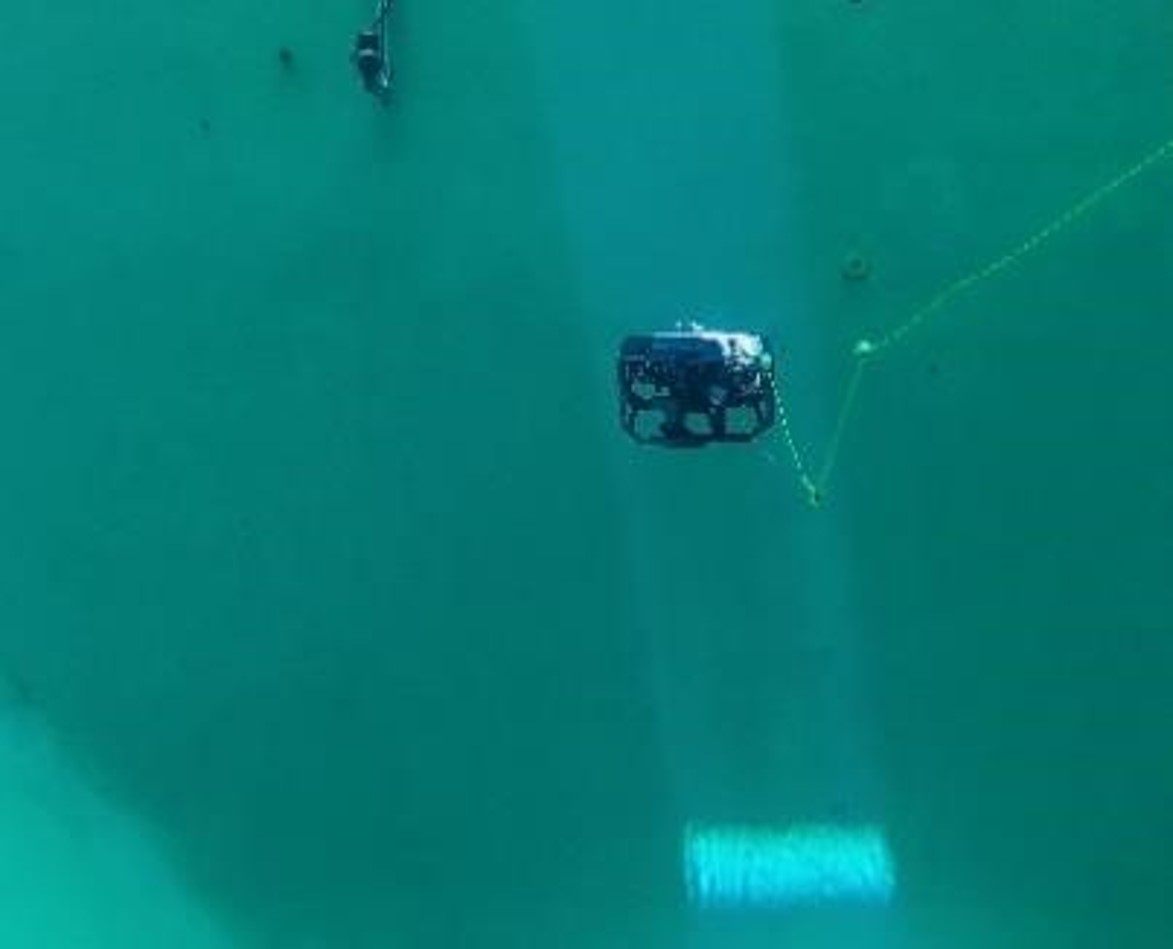
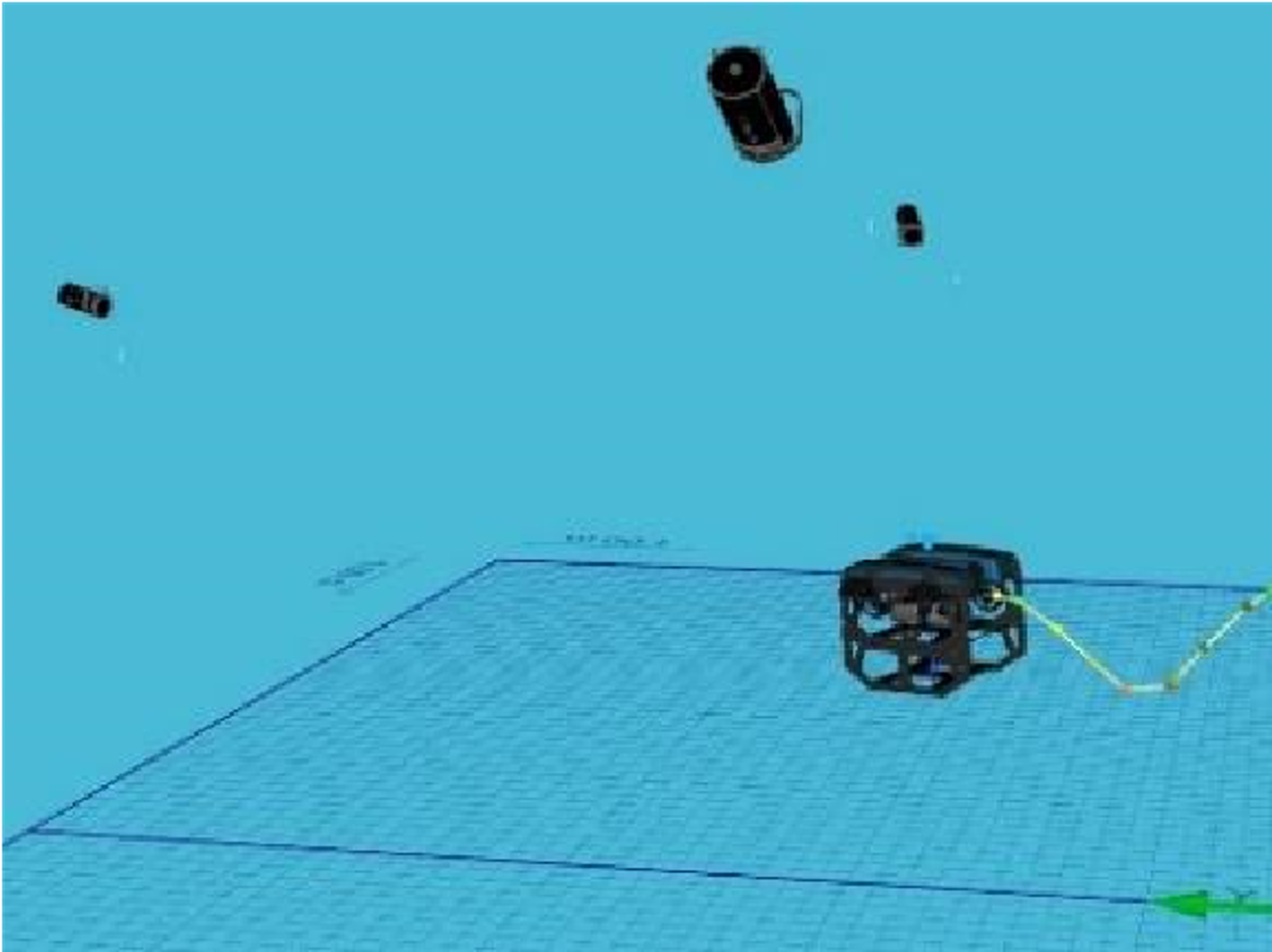
- Series 2 Experiment: Girona1000 connected to a fixed point by a buoyant tether. The Girona1000 moves around the attachment point. Its sensor data, and especially visual data are recorded. The robot and the tether’s 3D poses are both tracked using the motion tracking system.
- Series 3 Experiment: Humanly-teleoperated robot chain, consisting of 3 robots (Girona1000, Seasam and Bluerov) connected by buoyant tethers. The sensor data, and especially visual data are recorded. The whole system is tracked using the motion tracking system.
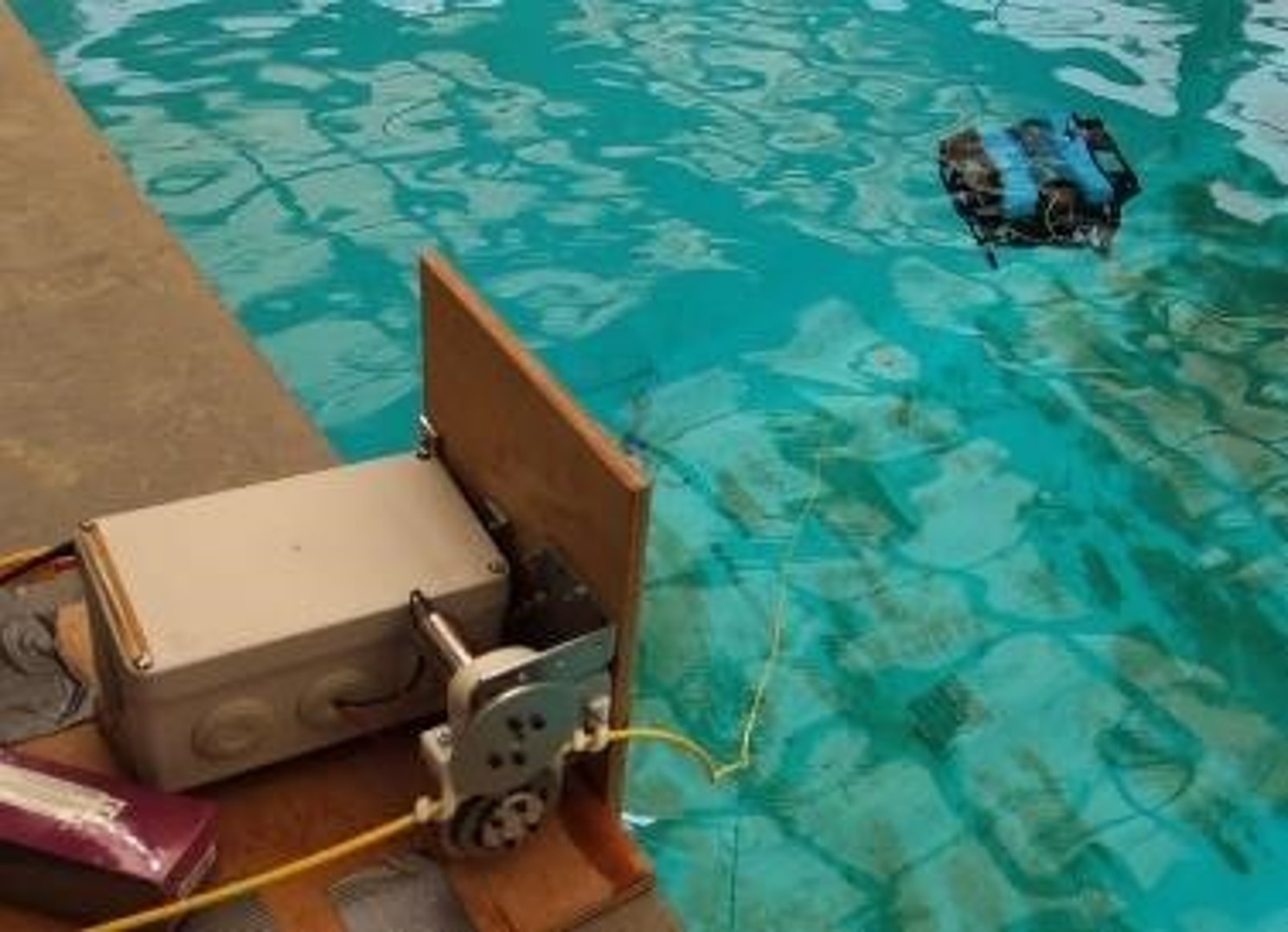
- Serie 4 Experiment: Smart winch for tether control. The behaviour of the ROV and its cable (with and without control) were observed thanks to the motion tracking system for two different planned trajectories of the ROV. We registered multiple data including:
- Videos from the outside and below the surface thanks to the tank window.
- Tracking of the vehicle and cable with the motion tracking system.
- Sensor data from the vehicle and the winch system.
- Serie 5 Experiment: Diver Localisation
- Serie 6 Experiment: Diver Gesture recognition
- Serie 7 Experiment: AUV Localisation
The end user mounted and calibrated the high-precision camera localization system. The objectives of the three proposed experiments here achieved, and additionally, an experiment regarding control of a chain of vehicles and a dataset with a monocular camera next to an underwater structure were also performed, having the camera localization system as the ground truth data for all of them.



Further publications are expected next year as a conference and journal paper.